
В асинхронном двигателе ротор движется «сам по себе». В нем изначально нет ни магнитного поля, на него не подается никакого электрического напряжения. Он даже не обязан быть сделанным из железа — магнитного металла. Ну а вот, поди ж ты, стоит подключить к двигателю трехфазное напряжение, и ротор закрутился. Безо всякого подталкивания. Но по-своему.
Два вида электродвигателей переменного тока
Асинхронные двигатели — наивная простота
Ротор то догоняет волну, то слегка отстает, потому что синхронно с ней бежать просто не может. Такое явление назвали «скольжением», догнав бегущее магнитное поле, ротор с беличьей клеткой теряет магнитную индукцию и дальше некоторое время просто скользит по инерции. А когда трение или нагрузка вынуждают его отстать от бегущего поля, он опять «почувствует» в себе изменения силовых линий обгоняющего его поля и снова обретет индукцию, а вместе с этим и силы двигаться.

То есть, ротор слегка проскальзывает: то догоняет бегущее равномерно по кругу магнитное поле, то «забывает, зачем бежал» и слегка приотстает, то снова «спохватывается» и опять стремится догнать. Постепенно эти отклонения стабилизируются — в зависимости от трения в подшипниках и величины нагрузки на вал — и асинхронный двигатель начинает работать просто со скоростью вращения, чуть меньшей частоты напряжения на статоре. Эта разница частот и называется частотой скольжения.
Двигатели синхронные: сложное в простом
Для того, чтобы ротор был связан с бегущей волной магнитного поля катушек статора жестким образом, придумали электродвигатель синхронный. А проблема решается просто. В роторе вместо изменяющегося магнитного поля от короткозамкнутых токов беличьей клетки нужно использовать постоянные магниты и их магнитное поле.

Вариантов два. Или это поле от постоянного магнита, закрепленного в роторе, или это поле от электромагнитов, установленных в роторе вместо такого магнита.
Обычный магнит, конечно, проще. Но тогда для стандартного функционирования таких электромоторов нужно, чтобы на них на всех — а используются тысячи электромоторов — магниты были строго одинаковы. Иначе параметры движения будут разными, а магниты еще имеют свойство размагничиваться.
Электромагнит, установленный в роторе двигателя, легче заставить вырабатывать поле нужного качества, но требуется электрический ток для его работы. Такой ток, который называется током возбуждения, в свою очередь нужно где-то брать и как-то на ротор подавать.

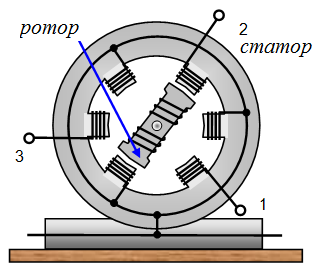
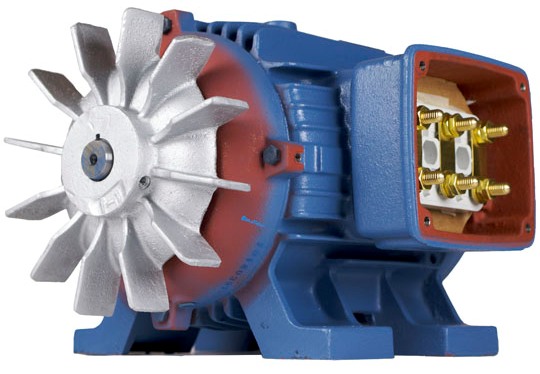
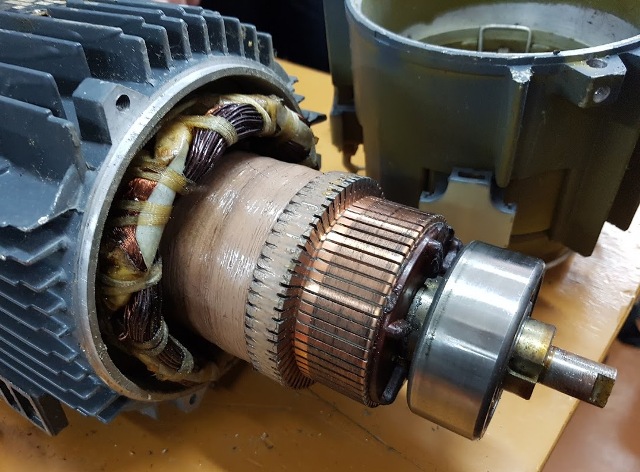
1 – ротор,
2 – коллектор возбуждения
Отсюда и происходит некоторое разнообразие конструкций синхронных двигателей. Но важнее всего то, что синхронные двигатели крутят свой вал строго синхронно частоте бегающего по кругу поля катушек статора, то есть скорость их вращения точно равна — или кратна (если обмоток статора больше трех) — частоте переменного тока в питающей сети.
Однако кроме всего прочего, синхронный двигатель обладает свойством полной обратимости. Потому что синхронный электродвигатель — это тот же самый генератор электрического тока, но работающий «в обратную сторону». В генераторе некоторая механическая сила вращает вал с ротором, и от этого в обмотках статора возникает наведенное электрическое напряжение от вращающегося магнитного поля ротора. А отличие синхронного двигателя от генератора в том, что напряжение в катушках статора порождает бегающее по кругу магнитное поле, которое, взаимодействуя с постоянным магнитным полем ротора, толкает его, чтобы ротор тоже вращался.
Только если в генераторе вращению ротора можно механически придать любую скорость, и от этого будет изменяться частота переменного тока, им генерируемого, то в синхронном двигателе такой роскоши нет. Синхронный двигатель вращается со скоростью изменения напряжения в сети, а оно у нас выдерживается строго в 50 герц.
Отличия и недостатки этих двигателей
Отличия синхронного и асинхронного двигателей ясны из их названий. Собственно, плюсы имеют и тот, и другой вариант конструкции. Ниже перечислены плюсы, которыми отличаются оба двигателя — синхронный и асинхронный.

Асинхронный двигатель отличается от синхронного следующими параметрами:
- простота конструкции и невысокая стоимость;
- нет скользящих контактов, надежность в эксплуатации;
- напряжение прикладывается к неподвижным катушкам статора;
- ротор очень прост по конструкции;
- при запуске и разгоне постепенно наращивает мощность;
- возможность реверсировать направление вращения, просто поменяв местами две питающих фазы;
- при остановке движения (слишком большая механическая нагрузка на вал ротора) никакой аварии не происходит, может произойти перегрев беличьей клетки.
Отличия синхронного двигателя от асинхронного заключаются в следующем:
- стабильная скорость вращения вне зависимости от нагрузки на вал;
- невысокая чувствительность к перепадам напряжения в сети;
- при уменьшении механической нагрузки способен по инерции работать как генератор, не забирая энергию, а отдавая ее в сеть;
- высокий КПД;
- способен компенсировать реактивную мощность сети.
Но у каждого имеются и присущие только ему недостатки.
Асинхронный имеет следующие отрицательные черты:
- трудность регулировки частоты вращения;
- невысокая частота вращения;
- зависимость отставания частоты вращения от нагрузки на ось;
- при работе ротор нагревается за счет короткозамкнутых токов — требуется дополнительное охлаждение.
Недостатки синхронного двигателя:
- сложнее по конструкции;
- в некоторых конструкциях для проводки тока возбуждения в обмотки ротора используется коллектор, как в двигателе постоянного тока;
- труднее запускается.


Несмотря на различия, оба электрических двигателя нашли себе применение в технике и используются в самых разных исполнениях и размерах.
В данной статье рассмотрим принципиальные отличия синхронных электродвигателей от асинхронных, чтобы каждый читающий эти строки мог бы эти различия четко понимать.
Асинхронные электродвигатели более широко распространены сегодня, однако в некоторых ситуациях синхронные двигатели оказываются более подходящими, более эффективными для решения конкретных промышленных и производственных задач, об этом будет рассказано далее.
Прежде всего давайте вспомним, что же вообще такое электродвигатель. Электродвигателем называется электрическая машина, предназначенная для преобразования электрической энергии в механическую энергию вращения ротора, и служащая в качестве привода для какого-нибудь механизма, например для приведения в действие подъемного крана или насоса.
Еще в школе всем рассказывали и показывали, как два магнита отталкиваются одноименными полюсами, а разноименными — притягиваются. Это постоянные магниты. Но существуют и переменные магниты. Каждый помнит рисунок с проводящей рамкой, расположенной между полюсами подковообразного постоянного магнита.
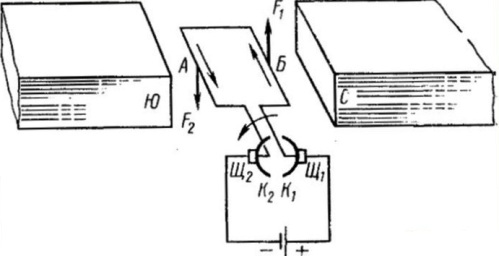
Горизонтально расположенная рамка, если по ней пустить постоянный ток, станет поворачиваться в магнитном поле постоянного магнита под действием пары сил (Сила Ампера), пока не будет достигнуто равновесие в вертикальном положении.
Если затем по рамке пустить постоянный ток противоположного направления, то рамка повернется дальше. В результате такого попеременного питания рамки постоянным током то одного, то другого направления, достигается непрерывное вращение рамки. Рамка здесь представляет собой аналог переменного магнита.
Приведенный пример с вращающейся рамкой в простейшей форме демонстрирует принцип работы синхронного электродвигателя. У любого синхронного электродвигателя на роторе есть обмотки возбуждения, на которые подается постоянный ток, формирующий магнитное поле ротора. Статор же синхронного электродвигателя содержит обмотку статора, для формирования магнитного поля статора.
При подаче на обмотку статора переменного тока, ротор придет во вращение с частотой, соответствующей частоте тока в обмотке статора. Частота вращения ротора будет синхронна частоте тока обмотки статора, поэтому такой электродвигатель называется синхронным. Магнитное поле ротора создается током, а не индуцируется полем статора, поэтому синхронный двигатель способен держать синхронные номинальные обороты независимо от мощности нагрузки, разумеется, в разумных пределах.
Асинхронный электродвигатель в свою очередь отличается от синхронного. Если вспомнить рисунок в рамкой, и рамку просто накоротко замкнуть, то при вращении магнита вокруг рамки, индуцируемый в рамке ток создаст магнитное поле рамки, и рамка будет стремиться догнать магнит.
Частота вращения рамки под механической нагрузкой будет всегда меньше частоты вращения магнита, и частота не будет поэтому синхронной. Этот простой пример демонстрирует принцип действия асинхронного электродвигателя.
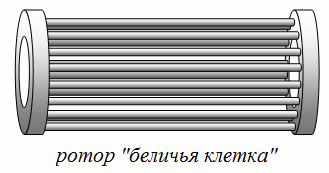
В асинхронном электродвигателе вращающееся магнитное поле формируется переменным током обмотки статора, расположенной в его пазах. Ротор типичного асинхронного двигателя обмоток как таковых не имеет, вместо этого на нем расположены накоротко соединенные стержни (ротор типа «беличья клетка»), такой ротор называется короткозамкнутым ротором. Бывают еще асинхронные двигатели с фазным ротором, там ротор содержит обмотки, сопротивление и ток в которых можно регулировать реостатом.
Итак, в чем же принципиальное отличие асинхронного электродвигателя от синхронного? С виду внешне они похожи, порой даже специалист не отличит по внешним признакам синхронный электродвигатель от асинхронного. Главное же отличие заключается в устройстве роторов. Ротор асинхронного электродвигателя не питается током, а полюса на нем индуцирутся магнитным полем статора.
Ротор синхронного двигателя имеет обмотку возбуждения с независимым питанием. Статоры синхронного и асинхронного двигателя устроены одинаково, функция в каждом случае одна и та же — создание вращающегося магнитного поля статора.
Обороты асинхронного двигателя под нагрузкой всегда на величину скольжения отстают от вращения магнитного поля статора, в то время как обороты синхронного двигателя равны по частоте «оборотам» магнитного поля статора, поэтому если обороты должны быть постоянными при различных нагрузках, предпочтительней выбирать синхронный двигатель, например в приводе гильотинных ножниц лучше всего справится со своей задачей мощный синхронный двигатель.

Область применения асинхронных двигателей сегодня очень широка. Это всевозможные станки, транспортеры, вентиляторы, насосы, — все то оборудование, где нагрузка сравнительно стабильна, или снижение оборотов под нагрузкой не критично для рабочего процесса.
Некоторые компрессоры и насосы требуют постоянной частоты вращения при любой нагрузке, на такое оборудование ставят синхронные электродвигатели.
Синхронные двигатели дороже в производстве, чем асинхронные, поэтому если есть возможность выбора и небольшое снижение оборотов под нагрузкой не критично, приобретают асинхронный двигатель.
Синхронные электродвигатели широко применяются в электроприводах, не требующих регулирования частоты вращения. По сравнению с асинхронными двигателями они имеют ряд преимуществ:
более высокий коэффициент полезного действия;
возможность изготовления двигателей с низкой частотой вращения, что позволяет отказаться от промежуточных передач между двигателем и рабочей машиной;
частота вращения двигателя не зависит от нагрузки па его валу;
возможность использования в качестве компенсирующих устройств реактивной мощности.
Синхронные электродвигатели могут являться потребителями и генераторами реактивной мощности. Характер и значение реактивной мощности синхронного двигателя зависят от величины тока в обмотке возбуждения. Зависимость тока в обмотке, выдающей напряжение в электрическую сеть, от тока возбуждения носит название U-образной характеристики синхронного двигателя. При 100%-ной нагрузке на валу двигателя его косинус фи равен 1. При этом электродвигатель не потребляет реактивной мощности из электрической сети. Ток в обмотке статора при этом имеет минимальное значение.
Асинхронные двигатели — это двигатели, в процессе работы которых под нагрузкой наблюдается явление скольжения, то есть «отставание» вращения ротора от вращения магнитного поля статора. Другими словами, вращение ротора происходит не синхронно с вращением намагниченности статора, а асинхронно по отношению к этому движению. Вот почему такого рода двигатели называются асинхронными (не синхронными) двигателями.
В большинстве случаев, произнося словосочетание «асинхронный двигатель», имеют ввиду именно бесколлекторный двигатель переменного тока. Величина скольжения асинхронного двигателя может быть разной в зависимости от нагрузки, а также от параметров питания и способа управления токами обмотки статора.
Если мы имеем дело с обычным двигателем переменного тока, наподобие АИР712А, то при синхронной частоте вращения магнитного поля в 3000 оборотов в минуту, в условиях номинальной механической нагрузки на валу в 750 ватт, мы будем иметь реальную частоту вращения 2840 оборотов в минуту, а значит величина скольжения составит 0,053.
Это нормальное явление для асинхронного двигателя. И на справочной табличке мы не увидим круглых цифр оборотов, вроде 3000 или 1500, вместо них там будет указано 2730 или 1325. Вместо 1000 может быть написано например 860, несмотря на то, что магнитное поле во время работы двигателя вращается с частотой 1000 оборотов в минуту, как и должно быть в электрической машине с 3 парами магнитных полюсов, предназначенной для питания переменным током частотой 50 Гц.
Что касается двигателей постоянного тока, то в большинстве случаев так называют коллекторные двигатели, на скорость вращения ротора у которых влияет не частота тока, а его средняя величина. Датчик скорости может помочь электронной системе управления установить правильную величину тока для получения заданной скорости вращения, однако связь тока и оборотов здесь будет отнюдь не линейной, так как при разной нагрузке токи разной величины дадут очень разные частоты вращения ротора.
На роторе двигателя постоянного тока может располагаться многосекционная обмотка возбуждения или постоянные магниты. Но сегодня ротор с магнитами характерен скорее для шаговых двигателей, которые тоже относятся к двигателям постоянного тока, однако коллекторно-щеточных узлов не имеют. Как вариант разновидности конструкции мотора постоянного тока — магниты на статоре, а обмотка — на роторе.
Так или иначе, асинхронный бесколлекторный двигатель имеет мощную рабочую обмотку на статоре, которая в процессе работы разогревается от прохождения по ней рабочего тока, и передает тепло на корпус двигателя. Поэтому и обмотку и корпус двигателя необходимо все время активно охлаждать.
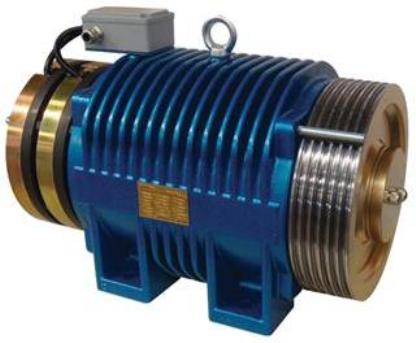
В связи с этой особенностью, большинство асинхронных двигателей по умолчанию имеют на своих валах крыльчатки вентиляторов, а на корпусах — выступы, вдоль которых вентилятор, как через радиатор, гонит свежий воздух, охлаждая таким образом статор. Поэтому, если перед вами двигатель, на валу которого установлен вентилятор (обычно под крышкой, закрепленной на корпусе двигателя), вдоль корпуса имеются ребра (как на радиаторе), а на шильдике указана конкретная величина оборотов в минуту и величины переменного напряжения 220/380 — пред вами типичный асинхронный двигатель переменного тока.
В двигателях постоянного тока, с коллекторно-щеточными узлами и с многосекционными многовитковыми обмотками на якарях, выведенными на ламели коллектора, в качестве рабочих обмоток выступают — и обмотка статора, и обмотка ротора (якоря).
Здесь фактически получается, что рабочая обмотка как-бы разделена на две части: рабочий ток идет и через якорную обмотку, и через статорную обмотку, поэтому проблема нагрева только статора отсутствует, и вентилятор здесь не нужен.
Для охлаждения достаточно вентиляционных отверстий, через которые можно разглядеть ротор с якорной обмоткой на нем. Поэтому, если перед вами двигатель с коллекторно-щеточным узлом, где коллектор имеет множество ламелей (блестящих пластинок) с выводами от обмоток, и вентилятора словно бы и не предусмотрено — перед вами двигатель постоянного тока.
Статор двигателя постоянного тока может представлять собой набор постоянных магнитов. Большинство двигателей постоянного тока, рассчитанных на сетевое напряжение, будут легко работать и от переменного тока (пример такого универсального мотора — мотор болгарки).
